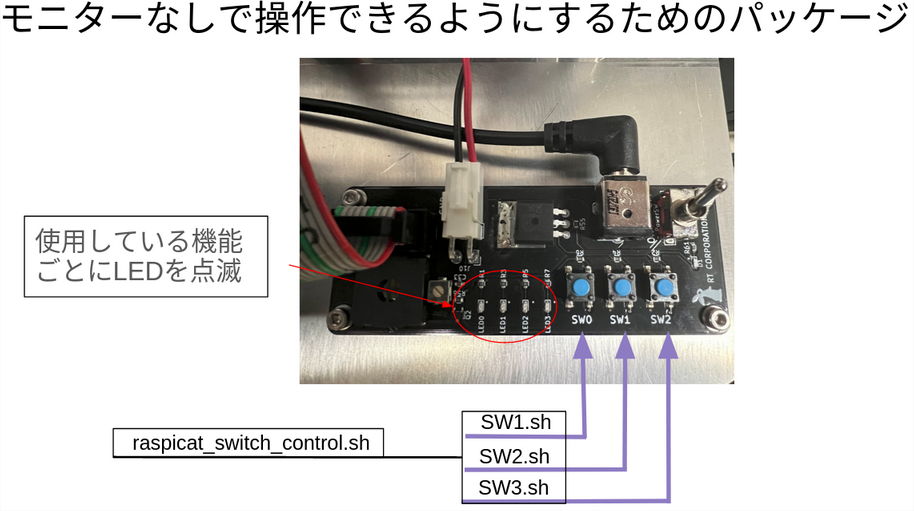
Raspberry Pi Catに搭載されているRaspberry Piのみでナビゲーションを行う際に、スイッチ(SW{0,1,2})を使用し、あらゆる操作行うためのパッケージです。
| LEDの点灯について | |
|---|---|
| LED0 | ros masterのプロセスが走っている |
| LED1 | SW0.shの処理が実行中なのか |
| LED2 | SW1.shの処理が実行中なのか |
| LED3 | SW2.shの処理が実行中なのか |
| スイッチ(SW{0,1,2})を押した場合について | |
|---|---|
| SW0 | SW0.shの処理の{実行,終了} |
| SW1 | SW1.shの処理の{実行,終了} |
| SW2 | SW2.shの処理の{実行,終了} |
サービスファイルのコピー
sudo cp raspicat_switch_control.service /etc/systemd/system
systemdに追加したファイルを反映
sudo systemctl daemon-reload
自動起動の有効化(起動時に実行されるようになる)
sudo systemctl enable raspicat_switch_control.service
サービスのスタート
sudo systemctl start raspicat_switch_control.service
例えば、SW0をnavigationの立ち上げ、SW1をwaypoint_navigationのスタート、SW2をrosbagの記録とした場合、以下のようになる。
他に実装したい機能があれば、SW{0,1,2}.shをそれぞれ編集してください。
sequenceDiagram
Note over 操作者: navigationの立ち上げ
操作者->> スイッチ(raspicat_switch_control.sh): navigation、センサーの立ち上げをやるで!SW0をポチッと
スイッチ(raspicat_switch_control.sh)->> ロボット: SW0が押されたからSW0.shを実行するで!
ロボット-->>操作者: SW0.shが実行されたから左から2番目のLEDを光らせるで!ナビゲーションの立ち上げ完了や!
Note over 操作者: rosbagの記録
操作者->> スイッチ(raspicat_switch_control.sh): rosbagを記録したいから、SW2をポチッと
スイッチ(raspicat_switch_control.sh)->> ロボット: SW2が押されたからSW2.shを実行するで!
ロボット-->>操作者: SW2.shが実行されたから左から4番目のLEDを光らせるで!rosbag録るで!終わった時はもっかいSW2を押してな!
Note over 操作者: waypoint_navigationのスタート
操作者->> スイッチ(raspicat_switch_control.sh): ヨシ!準備万端!navigationをスタートさせたいから、SW1をポチッと
スイッチ(raspicat_switch_control.sh)->> ロボット: SW1が押されたからSW1.shを実行するで!
ロボット-->>操作者: SW1.shが実行されたから左から3番目のLEDを光らせるで!ナビゲーションのスタートや!