updating comments on leg matrix t01 to show differences between origi… #8
Conversation
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
1 participant
Add this suggestion to a batch that can be applied as a single commit.
This suggestion is invalid because no changes were made to the code.
Suggestions cannot be applied while the pull request is closed.
Suggestions cannot be applied while viewing a subset of changes.
Only one suggestion per line can be applied in a batch.
Add this suggestion to a batch that can be applied as a single commit.
Applying suggestions on deleted lines is not supported.
You must change the existing code in this line in order to create a valid suggestion.
Outdated suggestions cannot be applied.
This suggestion has been applied or marked resolved.
Suggestions cannot be applied from pending reviews.
Suggestions cannot be applied on multi-line comments.
Suggestions cannot be applied while the pull request is queued to merge.
Suggestion cannot be applied right now. Please check back later.
Thanks for going through the paper and finding the discrepancies with matrix t01 and t12. It helped me a lot as I was looking through this. I found one typo I think in the comments of your code, where the paper t01 matrix i see here https://www.ijstr.org/final-print/sep2017/Inverse-Kinematic-Analysis-Of-A-Quadruped-Robot.pdf in row index 1 col index 1 has positive cos(theta1).
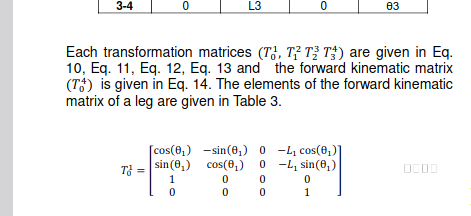
The matrix in the paper still has weird stuff going on in the row index 2. I only threw this PR out as the comments confused me slightly as I was comparing the matrices in your comments to the paper.
I agree with you, and did out the matrix math using their DH parameters and arrive at the same thing you got.
https://wikimedia.org/api/rest_v1/media/math/render/svg/6963d0c47a3a894ff0719c8df348d188b996074e
Looking at t01:
so that is:
so that is:
I did the same thing for matrix t12, and also got something that agrees with you, just with a different sign on the 1 in row index 2. This is probably do to spot micro doing legs pointing back, and alpha being positive pi/2 instead of -pi/2 as in the paper model.