diff --git a/CMakeLists.txt b/CMakeLists.txt
index 89d05b2..920cf6f 100644
--- a/CMakeLists.txt
+++ b/CMakeLists.txt
@@ -6,44 +6,29 @@ set(CMAKE_CXX_FLAGS "-g -Wall -std=c++11")
find_package(Eigen3 3.3 REQUIRED NO_MODULE)
if(NOT OMPL_INCLUDE_DIRS)
- find_package(ompl REQUIRED)
+ find_package(ompl REQUIRED)
endif()
-find_package(Threads REQUIRED)
-find_package(OpenGL REQUIRED)
find_package(GLEW REQUIRED)
+find_package(glfw3 REQUIRED)
+
+find_package(Threads REQUIRED)
find_package(yaml-cpp REQUIRED)
find_package(Boost 1.58 QUIET REQUIRED COMPONENTS serialization filesystem system program_options)
-add_library(mujoco-nogl SHARED IMPORTED)
-add_library(mujoco SHARED IMPORTED)
-add_library(glfw3 SHARED IMPORTED)
-
-if(APPLE)
- set_target_properties(mujoco-nogl PROPERTIES
- IMPORTED_LOCATION "$ENV{HOME}/.mujoco/mujoco200/bin/libmujoco200nogl.dylib"
- INTERFACE_INCLUDE_DIRECTORIES "$ENV{HOME}/.mujoco/mujoco200/include" )
-
- set_target_properties(mujoco PROPERTIES
- IMPORTED_LOCATION "$ENV{HOME}/.mujoco/mujoco200/bin/libmujoco200.dylib"
- INTERFACE_INCLUDE_DIRECTORIES "$ENV{HOME}/.mujoco/mujoco200/include" )
-
- set_target_properties(glfw3 PROPERTIES
- IMPORTED_LOCATION "$ENV{HOME}/.mujoco/mujoco200/bin/libglfw.3.dylib"
- INTERFACE_INCLUDE_DIRECTORIES "$ENV{HOME}/.mujoco/mujoco200/include" )
-elseif(UNIX)
- set_target_properties(mujoco-nogl PROPERTIES
- IMPORTED_LOCATION "$ENV{HOME}/.mujoco/mujoco200/bin/libmujoco200nogl.so"
- INTERFACE_INCLUDE_DIRECTORIES "$ENV{HOME}/.mujoco/mujoco200/include" )
-
- set_target_properties(mujoco PROPERTIES
- IMPORTED_LOCATION "$ENV{HOME}/.mujoco/mujoco200/bin/libmujoco200.so"
- INTERFACE_INCLUDE_DIRECTORIES "$ENV{HOME}/.mujoco/mujoco200/include" )
-
- set_target_properties(glfw3 PROPERTIES
- IMPORTED_LOCATION "$ENV{HOME}/.mujoco/mujoco200/bin/libglfw.so.3"
- INTERFACE_INCLUDE_DIRECTORIES "$ENV{HOME}/.mujoco/mujoco200/include" )
-endif()
+# Debugging info
+message(STATUS "-------- DEBUGGING ------------")
+get_cmake_property(_variableNames VARIABLES)
+foreach (_variableName ${_variableNames})
+ message(STATUS "${_variableName}=${${_variableName}}")
+endforeach()
+message(STATUS "-------- END DEBUGGING --------")
+
+
+# linking mujoco
+include_directories(${CMAKE_SOURCE_DIR}/mujoco-2.3.0/include)
+link_directories(${CMAKE_SOURCE_DIR}/mujoco-2.3.0/lib)
+
include_directories(${OMPL_INCLUDE_DIRS}, ${Boost_INCLUDE_DIR})
include_directories(3rd_party/include)
@@ -55,7 +40,7 @@ add_executable(plan plan.cpp
)
target_link_libraries(plan ${OMPL_LIBRARIES})
target_link_libraries(plan Eigen3::Eigen)
-target_link_libraries(plan mujoco-nogl)
+target_link_libraries(plan mujoco)
target_link_libraries(plan Threads::Threads)
target_link_libraries(plan yaml-cpp)
target_link_libraries(plan Boost::filesystem)
@@ -68,9 +53,7 @@ target_link_libraries(render_plan ${OMPL_LIBRARIES})
target_link_libraries(render_plan Eigen3::Eigen)
target_link_libraries(render_plan mujoco)
target_link_libraries(render_plan Threads::Threads)
-target_link_libraries(render_plan glfw3)
-target_link_libraries(render_plan OpenGL::GL)
-target_link_libraries(render_plan GLEW::GLEW)
+target_link_libraries(render_plan glfw)
add_executable(plan_kinematic plan_kinematic.cpp
src/mujoco_wrapper.cpp
@@ -78,7 +61,7 @@ add_executable(plan_kinematic plan_kinematic.cpp
)
target_link_libraries(plan_kinematic ${OMPL_LIBRARIES})
target_link_libraries(plan_kinematic Eigen3::Eigen)
-target_link_libraries(plan_kinematic mujoco-nogl)
+target_link_libraries(plan_kinematic mujoco)
target_link_libraries(plan_kinematic Threads::Threads)
target_link_libraries(plan_kinematic yaml-cpp)
@@ -90,9 +73,7 @@ target_link_libraries(render_plan_kinematic ${OMPL_LIBRARIES})
target_link_libraries(render_plan_kinematic Eigen3::Eigen)
target_link_libraries(render_plan_kinematic mujoco)
target_link_libraries(render_plan_kinematic Threads::Threads)
-target_link_libraries(render_plan_kinematic glfw3)
-target_link_libraries(render_plan_kinematic OpenGL::GL)
-target_link_libraries(render_plan_kinematic GLEW::GLEW)
+target_link_libraries(render_plan_kinematic glfw)
add_executable(smooth_plan smooth_plan.cpp
src/mujoco_wrapper.cpp
@@ -100,7 +81,7 @@ add_executable(smooth_plan smooth_plan.cpp
)
target_link_libraries(smooth_plan ${OMPL_LIBRARIES})
target_link_libraries(smooth_plan Eigen3::Eigen)
-target_link_libraries(smooth_plan mujoco-nogl)
+target_link_libraries(smooth_plan mujoco)
target_link_libraries(smooth_plan Threads::Threads)
target_link_libraries(smooth_plan yaml-cpp)
@@ -110,7 +91,7 @@ add_library(mujoco_ompl_nogl SHARED
target_include_directories(mujoco_ompl_nogl PUBLIC include)
target_link_libraries(mujoco_ompl_nogl ${OMPL_LIBRARIES})
target_link_libraries(mujoco_ompl_nogl Eigen3::Eigen)
-target_link_libraries(mujoco_ompl_nogl mujoco-nogl)
+target_link_libraries(mujoco_ompl_nogl mujoco)
target_link_libraries(mujoco_ompl_nogl Threads::Threads)
target_link_libraries(mujoco_ompl_nogl yaml-cpp)
@@ -123,6 +104,3 @@ target_link_libraries(mujoco_ompl Eigen3::Eigen)
target_link_libraries(mujoco_ompl mujoco)
target_link_libraries(mujoco_ompl Threads::Threads)
target_link_libraries(mujoco_ompl yaml-cpp)
-target_link_libraries(mujoco_ompl glfw3)
-target_link_libraries(mujoco_ompl OpenGL::GL)
-target_link_libraries(mujoco_ompl GLEW::GLEW)
diff --git a/README.md b/README.md
index c5789f8..3788d46 100644
--- a/README.md
+++ b/README.md
@@ -8,44 +8,95 @@ Some of the code found here is mildly project specific, and in the future we may
**Contact:** Max Pflueger `pflueger` at `usc.edu`
-## Requirements
-#### OMPL
-Install from here: https://ompl.kavrakilab.org/installation.html
-(If you install it from source, make sure to run 'make install'.)
-#### MuJoCo
-- Download mujoco200 here: https://www.roboti.us/index.html
-- Unpack libraries to ~/.mujoco/mujoco200
-- Place license file at ~/.mujoco/mjkey.txt
+## Build Instructions (new)
-#### Eigen3
-#### OpenGL
-#### GLEW
+Note: below is currently only tested on Ubuntu 20.04.
+1. Download MuJoCo release from https://github.com/deepmind/mujoco/releases/tag/2.3.0 (last tested version: 2.3.0)
-## Build
+2. Extract the content of compressed MuJoCo release into a folder `mujoco-2.3.0` under this repo's root directory.
+
+3. Install OMPL following instructions on https://ompl.kavrakilab.org/installation.html (last tested version 1.5.0)
+
+4. Ensure the following libraries can be found by CMake: ompl, Eigen3, GLEW, GLFW, Threads, yaml-cpp, Boost.
+
+5. Build:
+ ```
+ mkdir build && cd build
+ cmake ..
+ make
+ ```
+
+ Example output of `make`:
+ ```
+ [ 11%] Built target mujoco_ompl_nogl
+ [ 26%] Built target smooth_plan
+ [ 42%] Built target render_plan_kinematic
+ [ 57%] Built target plan_kinematic
+ [ 69%] Built target mujoco_ompl
+ Scanning dependencies of target render_plan
+ [ 73%] Building CXX object CMakeFiles/render_plan.dir/render_plan.cpp.o
+ [ 76%] Building CXX object CMakeFiles/render_plan.dir/src/mujoco_wrapper.cpp.o
+ [ 80%] Building CXX object CMakeFiles/render_plan.dir/src/mujoco_ompl_interface.cpp.o
+ [ 84%] Linking CXX executable render_plan
+ [ 84%] Built target render_plan
+ Scanning dependencies of target plan
+ [ 88%] Building CXX object CMakeFiles/plan.dir/plan.cpp.o
+ [ 92%] Building CXX object CMakeFiles/plan.dir/src/mujoco_wrapper.cpp.o
+ [ 96%] Building CXX object CMakeFiles/plan.dir/src/mujoco_ompl_interface.cpp.o
+ [100%] Linking CXX executable plan
+ [100%] Built target plan
+ ```
+
+
+## Run (new)
+
+Note: below is currently only tested on Ubuntu 20.04.
+
+
+**To create a plan file** (Assume you are in the repo root directory):
```
-cmake .
-make
+./build/plan ./problems/reacher_prob.yaml -o reacher_plan.out
```
-
-## Run
-MacOS requires to include the mujoco bin directory in the DYLD_LIBRARY_PATH:
+The output of this program ends with
```
-DYLD_LIBRARY_PATH=/Users/$USER/.mujoco/mujoco200/bin
+...
+Found Solution with status: Exact solution
+Solution wrote to file "reacher_sol.out"
```
-To create a plan file:
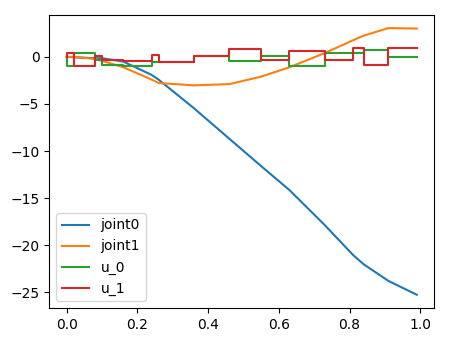
+**To visualize a plan as a graph** (Assume you are in repo root directory):
```
-./plan reacher.xml reacher_prob.yaml 10
+python3 plot_plan.py reacher_sol.out problems/reacher_info.yaml
```
-To visualize a plan as a graph:
+It may look like this:
+
+ +
+
+
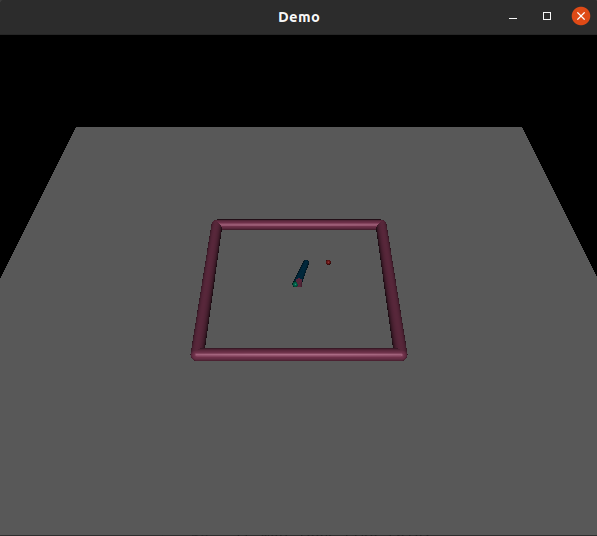
+**To rollout a plan in MuJoCo with rendering** (Assume you are in repo root directory)
```
-python3 plot_plan.py plan.out reacher_info.yaml
+./build/render_plan problems/reacher.xml build/reacher_sol.out
```
-To rollout a plan in MuJoCo with OpenGL rendering:
+You may see the reacher spinning in place, like:
+
+
+
+
+
+**To rollout a plan in MuJoCo with rendering** (Assume you are in repo root directory)
```
-python3 plot_plan.py plan.out reacher_info.yaml
+./build/render_plan problems/reacher.xml build/reacher_sol.out
```
-To rollout a plan in MuJoCo with OpenGL rendering:
+You may see the reacher spinning in place, like:
+
+ +
+
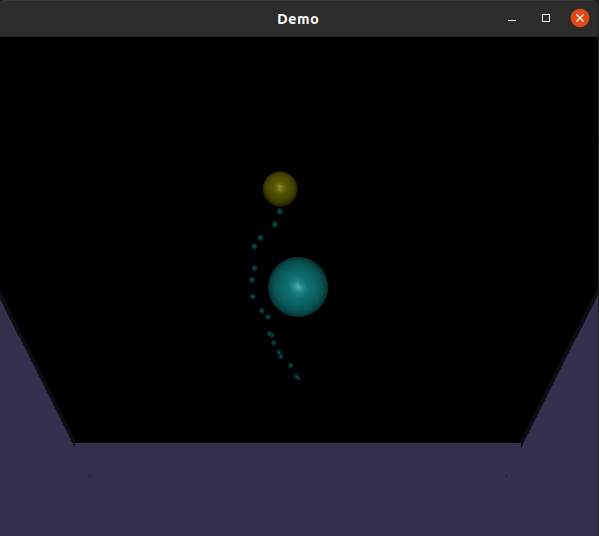
+[**etpr**](https://github.com/etpr) added kinematic planner and collision check (see [pull request](https://github.com/mpflueger/mujoco-ompl/pull/3)).
+You can try it with the 2d_point problem by
+```
+./build/plan_kinematic problems/2d_point.xml problems/2d_point_prob.yaml 1
+```
+The plan will be written to `plan.out`. You can render it by
```
-./render_plan reacher.xml plan.out
+./build/render_plan_kinematic problems/2d_point.xml ./plan.out
```
+Visualization:
+
+
+
+
+[**etpr**](https://github.com/etpr) added kinematic planner and collision check (see [pull request](https://github.com/mpflueger/mujoco-ompl/pull/3)).
+You can try it with the 2d_point problem by
+```
+./build/plan_kinematic problems/2d_point.xml problems/2d_point_prob.yaml 1
+```
+The plan will be written to `plan.out`. You can render it by
```
-./render_plan reacher.xml plan.out
+./build/render_plan_kinematic problems/2d_point.xml ./plan.out
```
+Visualization:
+
+ +
diff --git a/include/mujoco_wrapper.h b/include/mujoco_wrapper.h
index fee0bc6..9f37729 100644
--- a/include/mujoco_wrapper.h
+++ b/include/mujoco_wrapper.h
@@ -7,7 +7,7 @@
#include
#include
-#include "mujoco.h"
+#include "mujoco/mujoco.h"
struct JointInfo {
@@ -91,7 +91,7 @@ class MuJoCo {
return d;
}
-
+
std::string getJointName(int i) const {
// Avert your eyes of this horror
@@ -140,19 +140,19 @@ class MuJoCo {
d->time = s.time;
for(size_t i=0; i < m->nq; i++) {
if (i >= s.qpos.size()) break;
- d->qpos[i] = s.qpos[i];
+ d->qpos[i] = s.qpos[i];
}
for(size_t i=0; i < m->nv; i++) {
if (i >= s.qvel.size()) break;
- d->qvel[i] = s.qvel[i];
+ d->qvel[i] = s.qvel[i];
}
for(size_t i=0; i < m->na; i++) {
if (i >= s.act.size()) break;
- d->act[i] = s.act[i];
+ d->act[i] = s.act[i];
}
for(size_t i=0; i < m->nu; i++) {
if (i >= s.ctrl.size()) break;
- d->ctrl[i] = s.ctrl[i];
+ d->ctrl[i] = s.ctrl[i];
}
}
@@ -198,4 +198,3 @@ class MuJoCo {
static int mj_instance_count;
static std::mutex mj_instance_count_lock;
};
-
diff --git a/problems/cartpole_swingup.xml b/problems/cartpole_swingup.xml
index 76e3ca8..6dd04cc 100644
--- a/problems/cartpole_swingup.xml
+++ b/problems/cartpole_swingup.xml
@@ -22,6 +22,6 @@
+
diff --git a/include/mujoco_wrapper.h b/include/mujoco_wrapper.h
index fee0bc6..9f37729 100644
--- a/include/mujoco_wrapper.h
+++ b/include/mujoco_wrapper.h
@@ -7,7 +7,7 @@
#include
#include
-#include "mujoco.h"
+#include "mujoco/mujoco.h"
struct JointInfo {
@@ -91,7 +91,7 @@ class MuJoCo {
return d;
}
-
+
std::string getJointName(int i) const {
// Avert your eyes of this horror
@@ -140,19 +140,19 @@ class MuJoCo {
d->time = s.time;
for(size_t i=0; i < m->nq; i++) {
if (i >= s.qpos.size()) break;
- d->qpos[i] = s.qpos[i];
+ d->qpos[i] = s.qpos[i];
}
for(size_t i=0; i < m->nv; i++) {
if (i >= s.qvel.size()) break;
- d->qvel[i] = s.qvel[i];
+ d->qvel[i] = s.qvel[i];
}
for(size_t i=0; i < m->na; i++) {
if (i >= s.act.size()) break;
- d->act[i] = s.act[i];
+ d->act[i] = s.act[i];
}
for(size_t i=0; i < m->nu; i++) {
if (i >= s.ctrl.size()) break;
- d->ctrl[i] = s.ctrl[i];
+ d->ctrl[i] = s.ctrl[i];
}
}
@@ -198,4 +198,3 @@ class MuJoCo {
static int mj_instance_count;
static std::mutex mj_instance_count_lock;
};
-
diff --git a/problems/cartpole_swingup.xml b/problems/cartpole_swingup.xml
index 76e3ca8..6dd04cc 100644
--- a/problems/cartpole_swingup.xml
+++ b/problems/cartpole_swingup.xml
@@ -22,6 +22,6 @@