2026.01.28 - #61 - RF-DETR, Masked Depth Modeling, IGGT, RoMA V2, SpatialLLM #63
Description
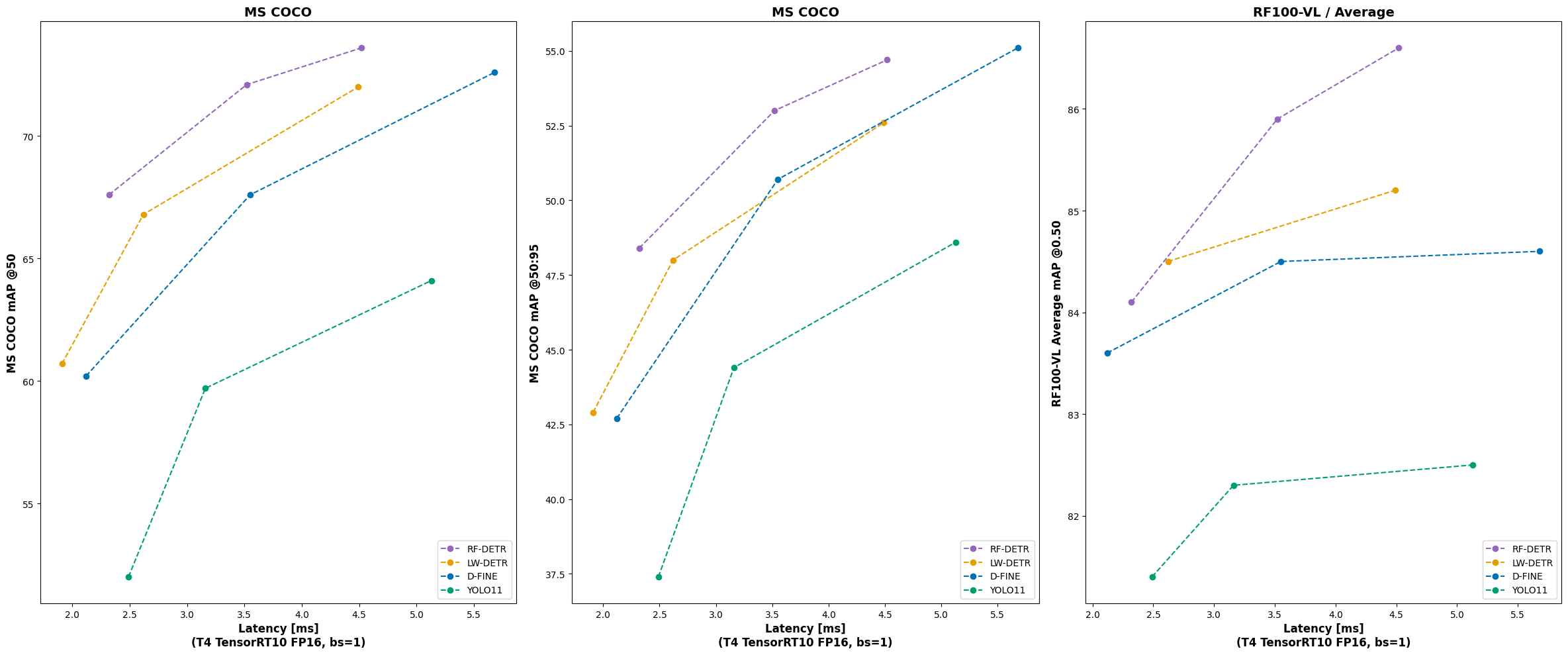
RF-DETR
- RoboFlow가 만든 실시간 instance segmentation
- DINOv2 ViT 백본 사용. Detection + Instance segmentation 가능
- Edge 디바이스에서 사용 가능
538699827-add23fd1-266f-4538-8809-d7dd5767e8e6.mp4
Masked Depth Modeling (LingBot-Depth)
- RGB-D 카메라의 성능을 개선하는 네트워크
- 일반 RGB-D 카메라들은 주로 glass, mirrors, metallic objects 에서 뎁스 추정에 쉽게 실패함 + spatio-temporal consistency가 부족함

https://technology.robbyant.com/lingbot-depth
https://www.bilibili.com/video/BV1oa6uBXEyh/
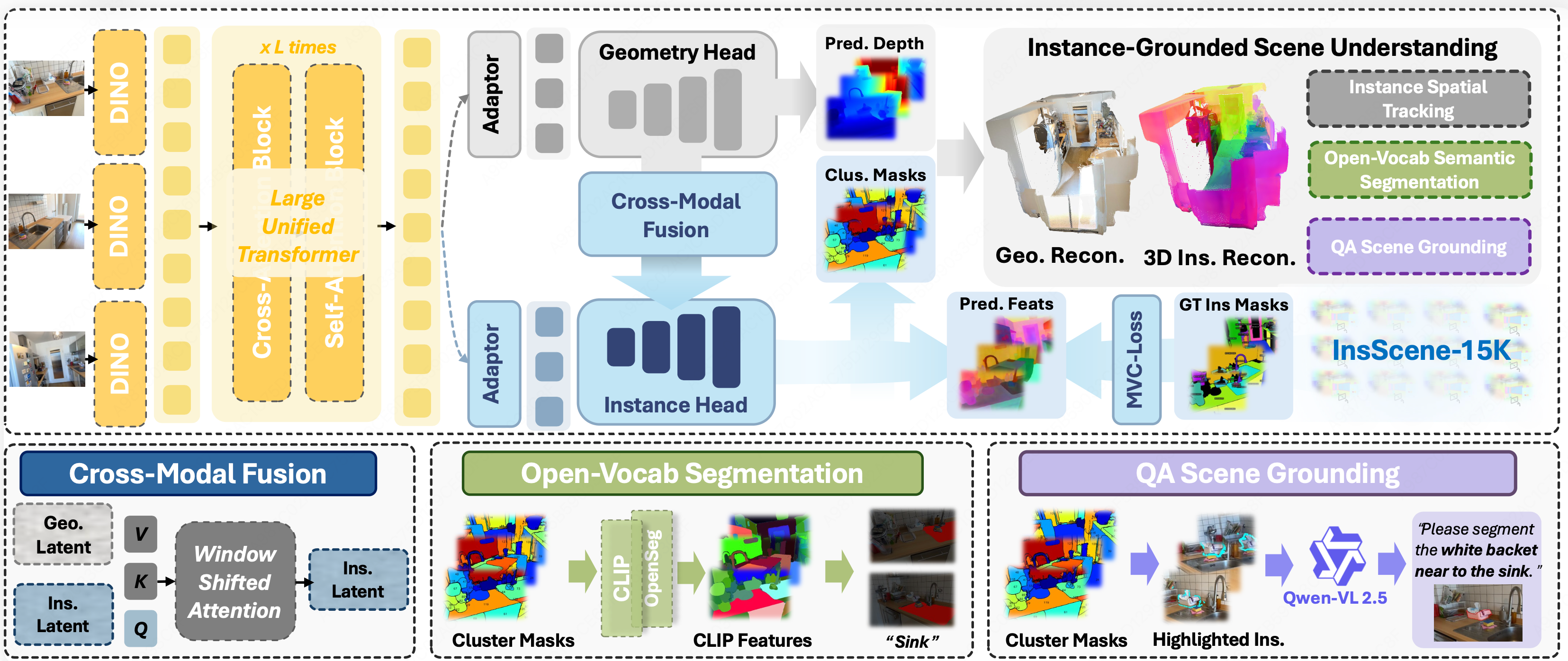
IGGT
- VGGT + VLM
- https://lifuguan.github.io/IGGT_official/

RoMA V2




SpatialLLM
- 위성지도 + 공간 정보 + VLM을 이용한 공간용 LLM
- https://github.com/WHU-USI3DV/SpatialLLM?tab=readme-ov-file
- https://arxiv.org/pdf/2505.12703



