
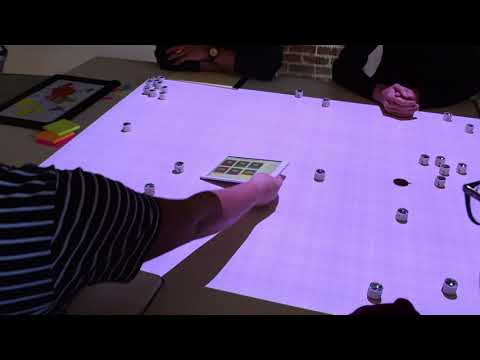
Dynamic composite physicalizations are a new class of physical visualizations that use collections of self-propelled objects to represent data. These can be used both to give physical form to well-known interactive visualization techniques, and to explore new visualizations and interaction paradigms. We illustrate dynamic composite physicalizations in a scenario demonstrating potential benefits for collaboration and decision making, as well as new opportunities for physical interaction.
Coming soon...
This work is a collaboration between Shape Lab in Stanford University USA, University of Victoria, Canada and Aviz Inria, France. We wish to thank Jung Hwa Bae, Lawrence Kim, Jingyi Li, Alexa Siu and Evan Strasnick for their precious help, as well as So Yeon Park and our reviewers for their valuable feedback. This work was supported in part by the Hasso Plattner Design Thinking Research Program.
