Application of Computer Vision Techniques for Object Detection and Recognition in Urban Environment Simulation oriented to Autonomous Driving Vehicles
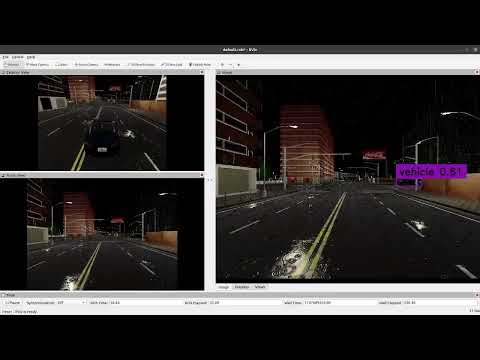
This project is focus on image object detection by training a model using YOLO. Simulations are done on CARLA Simulator and a integration with ROS has been developed.

-
Dataset: We create our custom dataset, using Roboflow Platform, by the integration of some existing datasets and the addition of multiple images of scenarios with different environmental and weather conditions. Dataset on Roboflow Platform
-
Simulator: We use the open-source simulator for autonomous driving systems CARLA. CARLA web page CARLA Github
-
Model Training: Model based on newest version of YOLO (YOLOv8) from Ultralytics. YOLOv8 Github
-
ROS: Running model inference for prediction and extra decission tasks modules.
-
ROS-Bridge: CARLA - ROS communication. ROS-Bridge Github








More info about the project can be found on Memory.pdf